Thank you, I have always believed that physics and engineering will not deceive people . Compared with the overwhelming publicity of domestic and foreign media before, the Optimus prototype can be said to meet the expectations of technology development, but it is lower than the expectations of the capital market and seriously lags behind public expectations. It is believed that the price of 20,000 US dollars is probably a gimmick if it has not reached the stage of mass production . In fact, what makes me most regretful is that when Elon Musk faced many questions about the landing and prospects of humanoid robots in the QA session of the press conference, he did not give a clear answer, and he did not even describe a scene with confidence. Using the vision of “the future is interesting, it won’t be boring” to prevaricate the past, it can be seen that Lao Ma has not figured out where humanoid robots can really be used . This may be a big blow to the prospects of the industry, after all Real-life Iron Man.
Here are some technical interpretations related to my direction for your reference:
hardware architecture
The overall hardware architecture of Tesla Optimus is based on the traditional humanoid robot hardware architecture of large battery pack + motor drive + rigid metal transmission + series-parallel joint distribution + vision/force/position sensors. The overall design concept is similar to LOLA of TUM in Germany and AIST in Japan. HRP5 , and Boston Dynamics’ humanoid robot Atlas belong to two completely different hardware architecture solutions.
The advantage of the Tesla Optimus hardware architecture is that it is stable, controllable and easy to implement. Relatively speaking, the implementation cost is low and the technology is mature. The main disadvantage is that the dynamic performance is poor, and it is heavy, so it is difficult to support high dynamic and large-scale motion performance.
whole body degrees of freedom
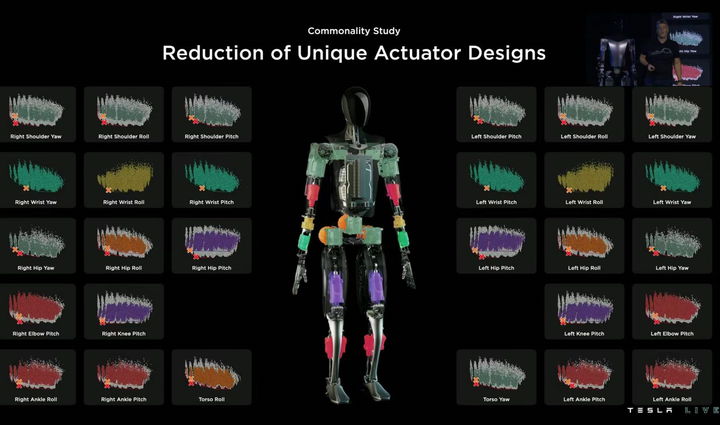
The total number of degrees of freedom of the body is 28 (excluding dexterous hands), and the specific distribution is as follows:
- Left arm/right arm: 7+7, shoulder 3+elbow 1+wrist 3;
- Left leg/right leg: 6+6, hip 3+ knee 1+ ankle 2;
- Waist: 2, Roll+Yaw;
Dexterity
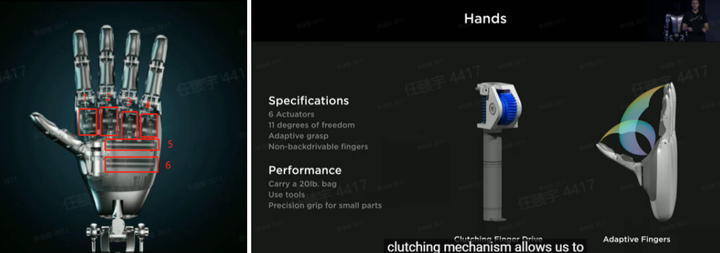
- Drive mode: rope drive;
- Self-locking ability: reverse self-locking (connect the worm gear and worm mechanism through the motor output, guess to use the worm gear and worm reverse self-locking);
- 6 degrees of freedom: 2 degrees of freedom for the thumb (1 swing, 1 bending); 1 degree of freedom for each of the other four fingers;
- 11 joints: 3 joints for the thumb, 2 joints for each of the other four fingers; each finger is bent with 2 joints;
- Load capacity: about 9kg (actually the load capacity of a special working condition of the robotic arm, which has nothing to do with the dexterous hand);
- Bionicity: rope drive, adaptive grip, better bionicity;
As for the fingertip grip strength, self-weight, dexterity, electronic skin, tactile feedback and other performances of the dexterous hand, none of them were mentioned in the press conference. In addition, from my personal experience, I am very interested in the rope-driven (tendon-driven) The reliability and mass production of the dexterous hand raised great doubts.
Driving principle

The overall power supply is powered by a battery pack, and it is in the form of an electric drive servo joint. As shown in the figure above, there are two types of servo joints in Optimus: rotary joints based on frameless torque motor + harmonic reducer, and linear joints based on torque motor + ball screw . The overall output torque density of the rotary joint is similar to the performance of the joints of major humanoid robot manufacturers. The linear joint focuses on the force output capability, but greatly sacrifices the output speed performance. I think this is not a good design solution and may limit High dynamic movement ability of the lower limbs.
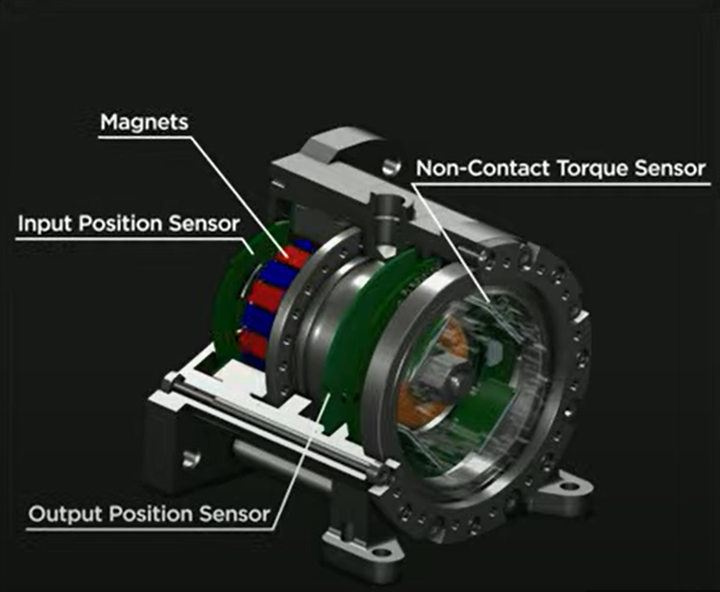
sensor configuration
| type | vision sensor | force sensor | position sensor | IMU |
|---|---|---|---|---|
| describe | Left/Right Column Camera Fisheye Camera | Joint integrated non-contact torque sensor | Joint integrated dual position encoder | NA |
The “non-contact torque sensor” mentioned here, from the picture below, is essentially a torque sensor based on the encoder/or Hall principle to measure material deformation. It is a non-traditional strain gauge type, which is quite fancy. name;
Electrical wiring harness
As can be seen from the figure above, Tesla Optimus’s electrical wiring harness design is relatively basic. There are a large number of exposed wiring harnesses outside the robotic arm, and the hollow wiring design is not even used on the wrist. At this stage, it can be said that there is no professional and systematic wiring harness design.
Joint module
- The upper limb adopts the rotary joint scheme of frameless motor + harmonic reducer:
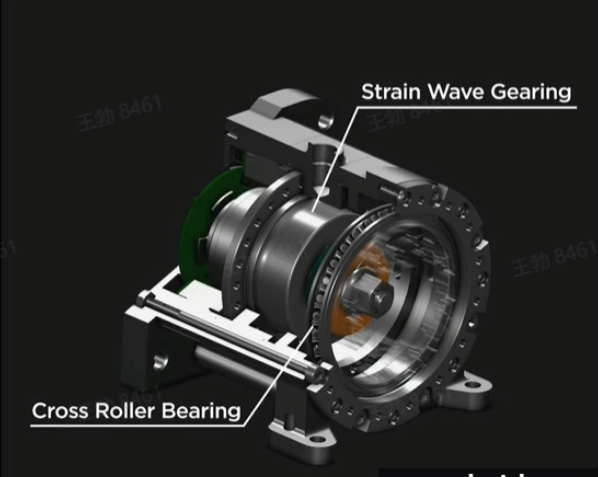
Basically, it is highly similar to the joint scheme of the current cooperative manipulator, frameless torque motor + harmonic reducer + high and low speed dual encoder + brake + torque sensor + crossed roller bearing at the output end. I don’t think this solution would be too cumbersome if it is used on a fixed-base cooperative robot arm, but it would be too cumbersome to use it on a floating-base biped, especially since each joint is integrated with a brake. Looking at the entire press conference, I did not see Tesla announce the weight of the Optimus prototype, and I may not be very satisfied with the weight of the current prototype.
- The lower limbs adopt the linear actuator solution of frameless motor + planetary screw:
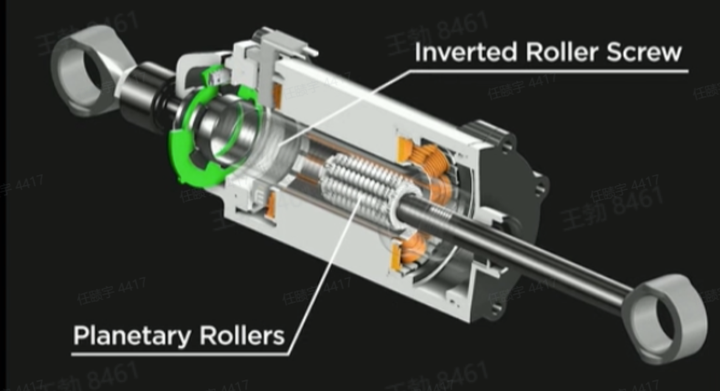
Compared with the upper limb joint, the lower limb joint scheme lacks a brake, and uses a planetary screw with self-locking ability to convert rotational motion into linear motion. I personally don’t like the screw drive scheme very much, because as mentioned above, the general screw has high transmission precision and strong output force capability, but the reverse drive transparency is poor and the response speed is slow. This drive scheme will be extremely difficult. It greatly restricts the high-dynamic movement ability of the lower limbs, and the cost is not low at the same time.
Structural drive
- The height and weight of the whole machine were not mentioned in the press conference. The visual height is about 1.7 meters, and the weight is estimated to be closer to 70kg;
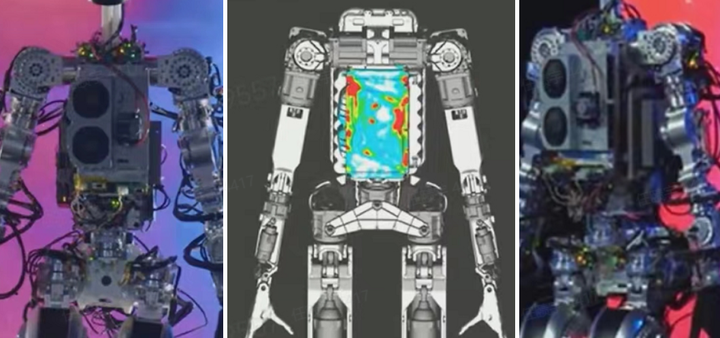
- The battery and the main board are arranged inside the chest cavity, as shown in the figure below, two huge cooling fans are installed on both sides of the main board, the battery capacity is 2.3kWh, the power is 52v, and the outside is protected by a metal shell, which has high safety. The battery capacity is huge under this volume. It is a very good place that Tesla has done. It should be the reuse of its electric vehicle battery technology, which is really a blow to dimensionality reduction ;
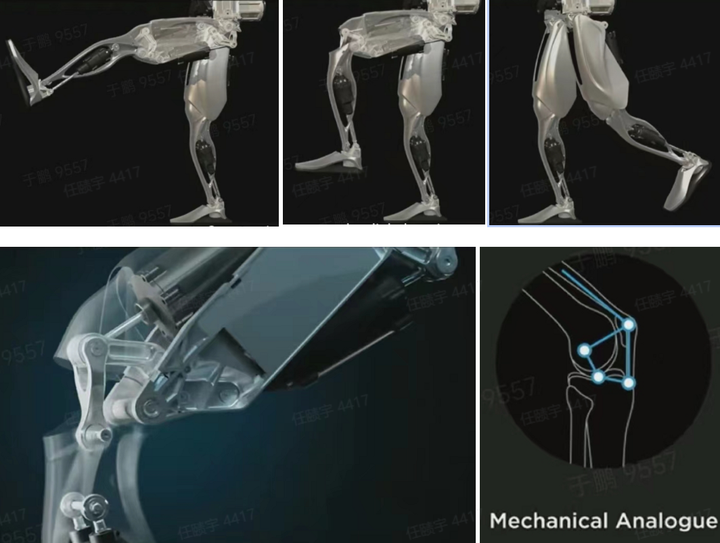
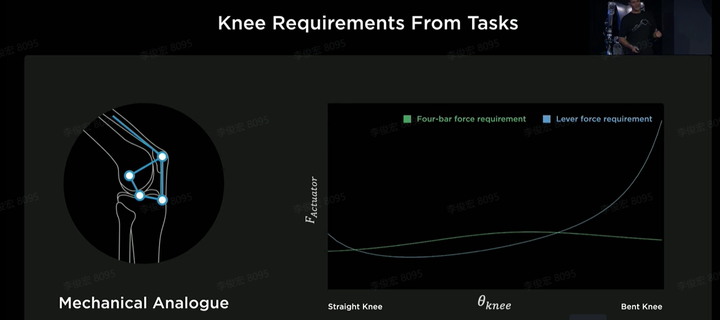
- The knee joint adopts a bionic design as shown in the figure below. In fact, I have not seen the obvious performance advantages of this bionic design, and it is not possible to achieve a straight knee when walking (the real knee structure of human beings is an extremely complex structure. Coupling of rolling pair + moving pair), there is no significant advantage of this design yet;
- There are 2 degrees of freedom in the waist, forming Roll+Yaw, which is a very good place for Tesla. The extra degrees of freedom in the waist are helpful for the realization of various bionic movements . Compared with the lack of waist freedom in Xiaomi Tie At a certain speed, some of Optimus’ movements can be presented more naturally, which is what Tieda needs to learn from Optimus. However, the design of the two degrees of freedom of the waist is also extremely difficult. The weight of the entire upper body is placed here. Poor design can easily cause low stiffness and vibration when operating the upper limbs. We can also see in the video that when locomotion The shaking of the head and hands is large.
emulation
This piece needs to focus on the hardware simulation platform, which is what Tesla does very well . Relying on the mature automotive reliability simulation platform, it provides a lot of solutions for the structural design and reliability design of robots from the perspective of mass production/cost. Evaluating and optimizing technical support is, to a certain extent, a blow to dimensionality reduction. Below I will show you the various simulation scenarios mentioned in the Tesla press conference in the form of screenshots. I will not expand on the space relationship. If you are interested, you can go back and watch the original video.
- Reliability Simulation of Robot Anti-fall
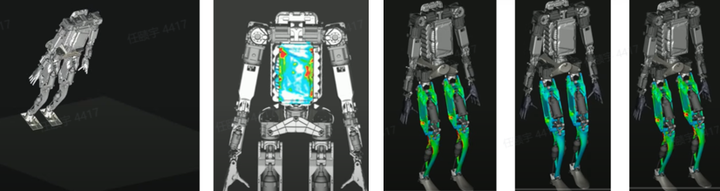
- Robot preset scene reliability simulation
- Structural Design Simulation
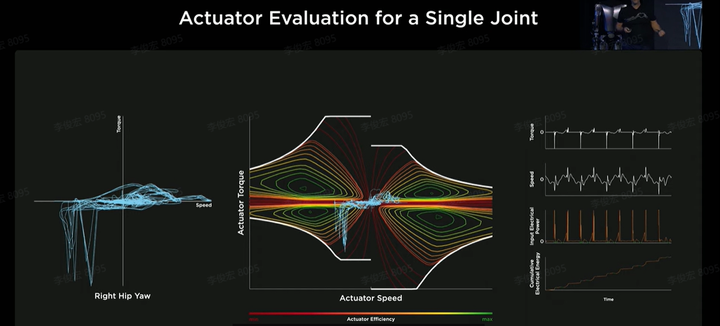
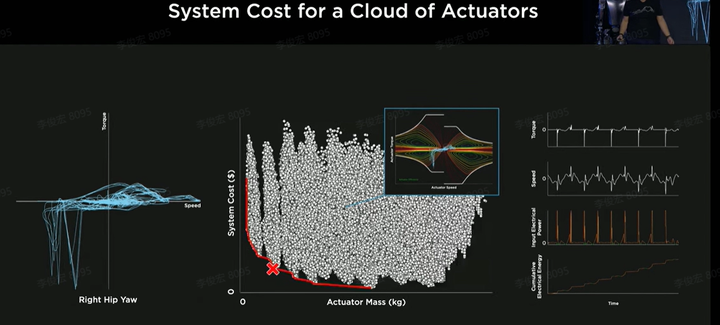
- Motor selection/design simulation
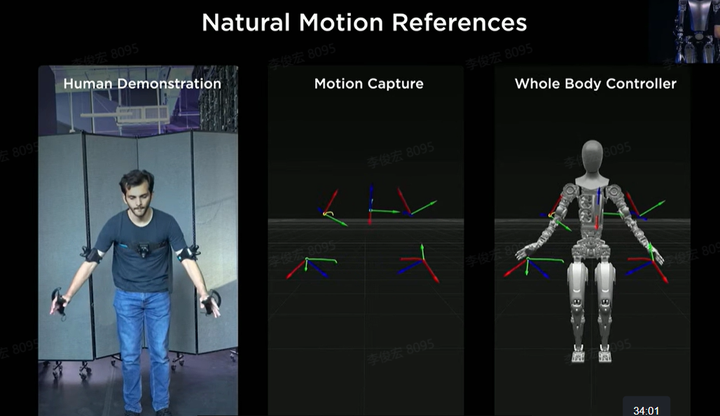
- Dynamics Simulation Environment and Application (Motion Capture)
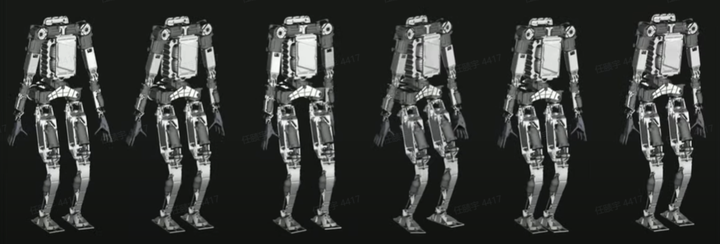
sport control
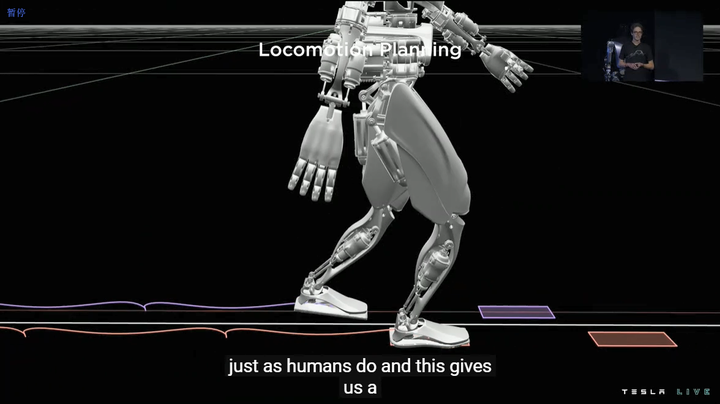
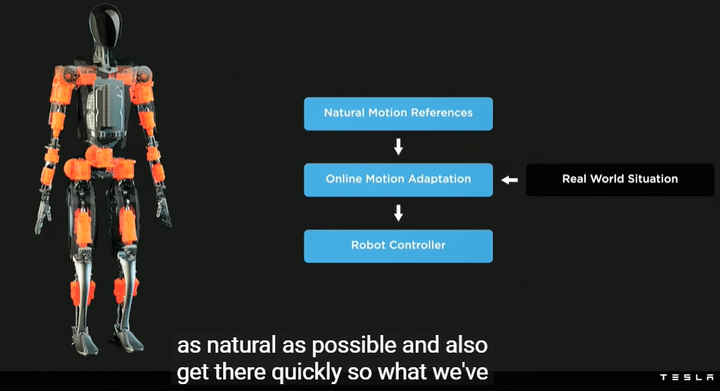
Overall, Optimus still uses traditional Static-ZMP, Linear-ZMP or DCM solutions for lower limb walking, similar to Asimo, suitable for slow walking with flat feet and bipedal feet, weak resistance to external interference, and poor dynamic performance. Here is also mentioned a high-efficiency humanoid gait, as shown in the figure below, the Toe-off-heel strike is considered when swinging the foot, combined with the coordinated arm swing movement of the upper body, and the data of human walking, to achieve natural arm swing and long-span Step and walk with straight knees as much as possible, which improves walking efficiency and posture.
The upper limb operation first uses the offline motion library of the human body obtained by motion capture, and then performs offline optimization and online (for specific task scenarios) optimization. Some techniques of imitation learning may be used when constructing the offline motion library. The trajectory planning of the arm may Correlation algorithm using Berkeley Trajopt.
To be honest, the sports ability and control algorithm displayed by Optimus in this press conference are very elementary and basic. Here is the evaluation QAQ of YY big guy:
Perception
At present, Optimus should only show vision-related perception capabilities, and has not seen radar, ToF, IMU, and ultrasound. In the application of moving things in factories, there are applications of GPS sensors.
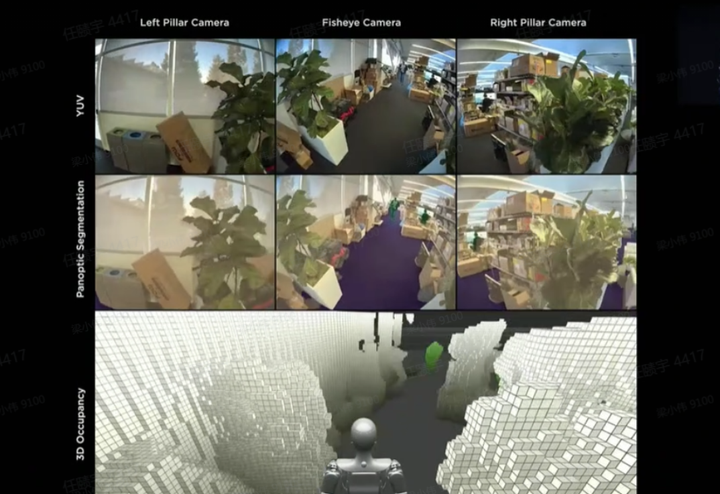
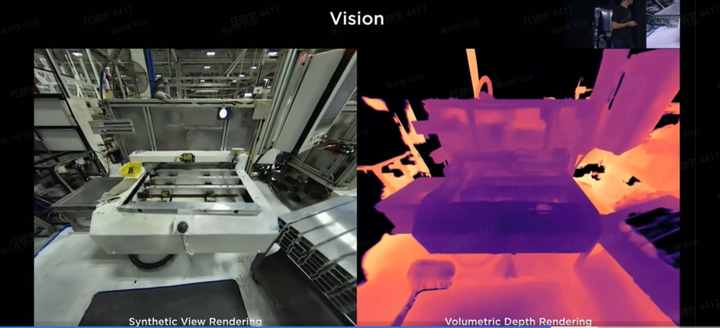
As mentioned above, the visual camera hardware is a left and right monocular camera + fisheye. The hardware cost is low, but the algorithm is complex and computationally powerful, and it depends on the hardware. In the picture below, you can see that Optimus has achieved accurate 3D environment modeling, and at the same time can achieve very clear and high-precision depth images through binocular ranging, which is very helpful for precise grasping of the ends of the arms.
It is speculated here that the relevant algorithms and capabilities of visual perception on Tesla cars were reused, and quickly integrated into the robot Optimus, which once again formed a dimensionality reduction blow.
To sum up, it took Tesla a year to achieve the level of today’s Optimus prototype. I think it is very hard-core in terms of engineering technology. I would like to praise Tesla’s engineers, especially in terms of dexterous hands, waist freedom, and hardware simulation. The platforming, binocular vision, etc. all did an excellent job in the limited time . But still go back to the sentence I said earlier, physics and engineering will not lie , the moon abroad is not as round as that in China, and the humanoid robot driven by electric drive, compared with Tesla, I urge everyone to pay more attention to the precipitation and accumulation. For the long-term Digit and Cassie (Agility Robotics), there is no need to benchmark Boston Dynamics for the time being. Optimus does not have this ability to PK.
In the end, I still hope that everyone will look at the development of a new industry segment with an inclusive attitude, and this applies to Optimus as well as Tieda. There is no new engineering technology that can be achieved overnight in 1-2 years (don’t overestimate technology), but if the front is stretched to 10-15 years, it may bring about earth-shaking changes (don’t underestimate technology).
Source: Zhihu www.zhihu.com
Author: Ren Yuyu
[Zhihu Daily] The choice of tens of millions of users, to be a big cow to share new things in the circle of friends.
click to download
There are 378 answers to this question, see all.
Further reading:
Tesla humanoid robot Optimus Prime prototype unveiled, how about its design?
Tesla humanoid robot Optimus Prime will be unveiled, what are your expectations for the product?
This article is reproduced from: http://www.zhihu.com/question/557190222/answer/2697301542?utm_campaign=rss&utm_medium=rss&utm_source=rss&utm_content=title
This site is only for collection, and the copyright belongs to the original author.